Tugas Pendahuluan 1
Percobaan 2 kondisi 7
(Led RGB, Motor Stepper, & Soil Moisture)
3. Compile program dalam format hex, lalu upload ke dalam mikrokontroler.
4. Setelah program selesai di upload, jalankan simulasi rangkaian pada proteus.
2. Hardware dan Diagram Blok[Kembali]
Hardware :
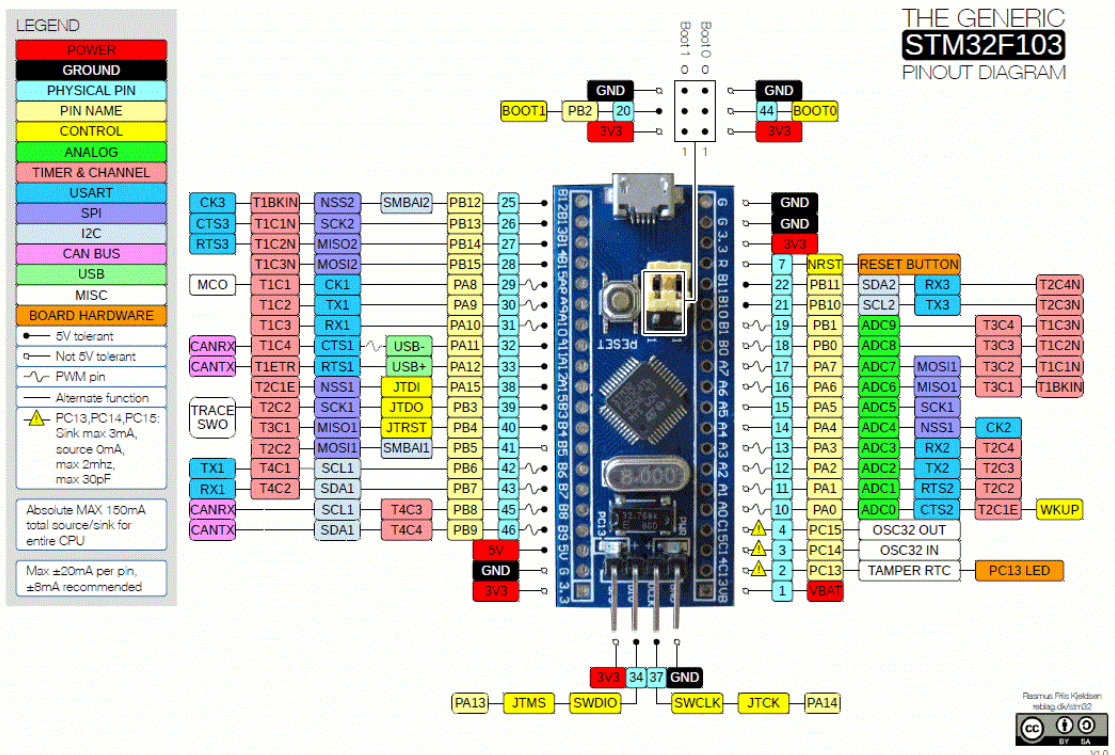
- Mikrokontroler STM32F103C8

- Sensor Soil Moisture


- LED RGB


- Resistor
.jpg)
- Potensiometer


- Powersupply



3. Rangkaian Simulasi[Kembali]
- Rangkaian sebelum di running

- Rangkaian setelah di running

- Prinsip Kerja
Berfungsi untuk mengukur tinggat kelembaban tanah, dengan output berupa tegangan analok yang bervariasi tergantung kadar air dalam tanah. Semakin basah tanah, semakin rendah nilai ADC karena konduktivitas tinggi berlaku sebaliknya.
2). Mikrokontroler STM32
- LED merah menyala
- LED hijau mati
- Motor stepper berputar searah jarum jam (CW)
- LED merah mati
- LED hijau menyala
- Motor tidak berputar
4. Flowchart dan Listing Program[Kembali]
- Flowchart


- Listing Program
ADC_HandleTypeDef hadc1;
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim2;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_ADC1_Init(void);
static void MX_TIM1_Init(void);
static void MX_TIM2_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_ADC1_Init();
MX_TIM1_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); // Motor PWM
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3); // Buzzer PWM
HAL_ADC_Start(&hadc1);
uint8_t buzzer_enabled = 1;
uint32_t last_buzzer_change = 0;
uint8_t buzzer_freq_index = 0;
const uint32_t buzzer_periods[] = {143999, 71999, 47999}; // Frekuensi berbeda
// Threshold (dari rendah → sedang → tinggi)
const uint16_t THRESH_LOW = 1500;
const uint16_t THRESH_MID = 3000;
while (1)
{
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, 10);
uint32_t adc_val = HAL_ADC_GetValue(&hadc1);
// --- Motor Control ---
if (adc_val < THRESH_LOW)
{
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 200); // Lambat
}
else if (adc_val < THRESH_MID)
{
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 600); // Sedang
}
else
{
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 1000); // Cepat
}
// --- Buzzer Logic ---
if (adc_val < THRESH_LOW && buzzer_enabled)
{
// Ubah frekuensi buzzer setiap 500ms
if (HAL_GetTick() - last_buzzer_change >= 500)
{
last_buzzer_change = HAL_GetTick();
buzzer_freq_index = (buzzer_freq_index + 1) % 3;
uint32_t period = buzzer_periods[buzzer_freq_index];
__HAL_TIM_SET_AUTORELOAD(&htim2, period);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, period / 2); // 50% duty
}
}
else
{
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 0); // Matikan buzzer
}
// --- Button Logic (PB0 ditekan = nonaktifkan buzzer) ---
if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_SET)
{
buzzer_enabled = 0;
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 0); // Paksa matikan buzzer
}
HAL_Delay(10);
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC;
PeriphClkInit.AdcClockSelection = RCC_ADCPCLK2_DIV2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
static void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
}
static void MX_TIM1_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 65535;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim1);
}
static void MX_TIM2_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim2);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin : PB0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif /* USE_FULL_ASSERT */
Percobaan 2 Kondisi 4
Komentar
Posting Komentar