1. Analisis Konfigurasi Rangkaian dan Program
Dalam percobaan ini, konfigurasi rangkaian dan program disesuaikan dengan jenis protokol komunikasi yang digunakan. Untuk UART (Universal Asynchronous Receiver Transmitter), komunikasi dilakukan melalui dua jalur utama, yaitu TX (Transmit) dan RX (Receive), yang dihubungkan langsung antara dua mikrokontroler atau antara mikrokontroler dan perangkat lain seperti modul Bluetooth atau GPS. Programnya menginisialisasi komunikasi serial dengan kecepatan baud tertentu (misalnya, 9600 bps) menggunakan fungsi `Serial.begin()`.
Pada protokol SPI (Serial Peripheral Interface), konfigurasi rangkaian melibatkan empat jalur utama: MOSI (Master Out Slave In), MISO (Master In Slave Out), SCK (Serial Clock), dan SS/CS (Slave Select/Chip Select). Jalur-jalur ini menghubungkan mikrokontroler dengan perangkat periferal seperti sensor atau modul memori. Programnya mengatur mikrokontroler sebagai master atau slave, menginisialisasi SPI dengan fungsi `SPI.begin()`, dan menggunakan fungsi `SPI.transfer()` untuk mengirim dan menerima data.
Sementara itu, protokol I²C (Inter-Integrated Circuit) menggunakan dua jalur utama: SDA (Serial Data Line) dan SCL (Serial Clock Line). Jalur-jalur ini memungkinkan komunikasi antara mikrokontroler (sebagai master) dan beberapa perangkat slave dengan alamat unik masing-masing. Programnya menggunakan pustaka seperti `Wire.h` untuk Arduino, menginisialisasi komunikasi dengan `Wire.begin()`, dan menggunakan fungsi `Wire.write()` dan `Wire.read()` untuk mengirim dan menerima data.
2. Proses Komunikasi yang Terjadi pada Percobaan (UART/SPI/I²C)
Proses komunikasi pada percobaan ini berbeda tergantung pada protokol yang digunakan. Pada UART, komunikasi bersifat asinkron dan tidak memerlukan sinyal clock bersama. Data dikirim dalam bentuk frame yang terdiri dari start bit, data bit, optional parity bit, dan stop bit. Komunikasi terjadi secara dua arah antara dua perangkat.
Pada SPI, komunikasi bersifat sinkron dan menggunakan sinyal clock bersama. Mikrokontroler sebagai master mengontrol komunikasi dengan perangkat slave melalui jalur SS/CS. Data dikirim secara full-duplex, memungkinkan pengiriman dan penerimaan data secara simultan.
Sedangkan pada I²C, komunikasi juga bersifat sinkron dan memungkinkan multiple master dan multiple slave. Mikrokontroler sebagai master menginisiasi komunikasi dengan mengirimkan alamat slave yang dituju, diikuti dengan operasi baca atau tulis. Semua perangkat terhubung melalui dua jalur SDA dan SCL.
3. Proses Input dan Output yang Terjadi pada Percobaan
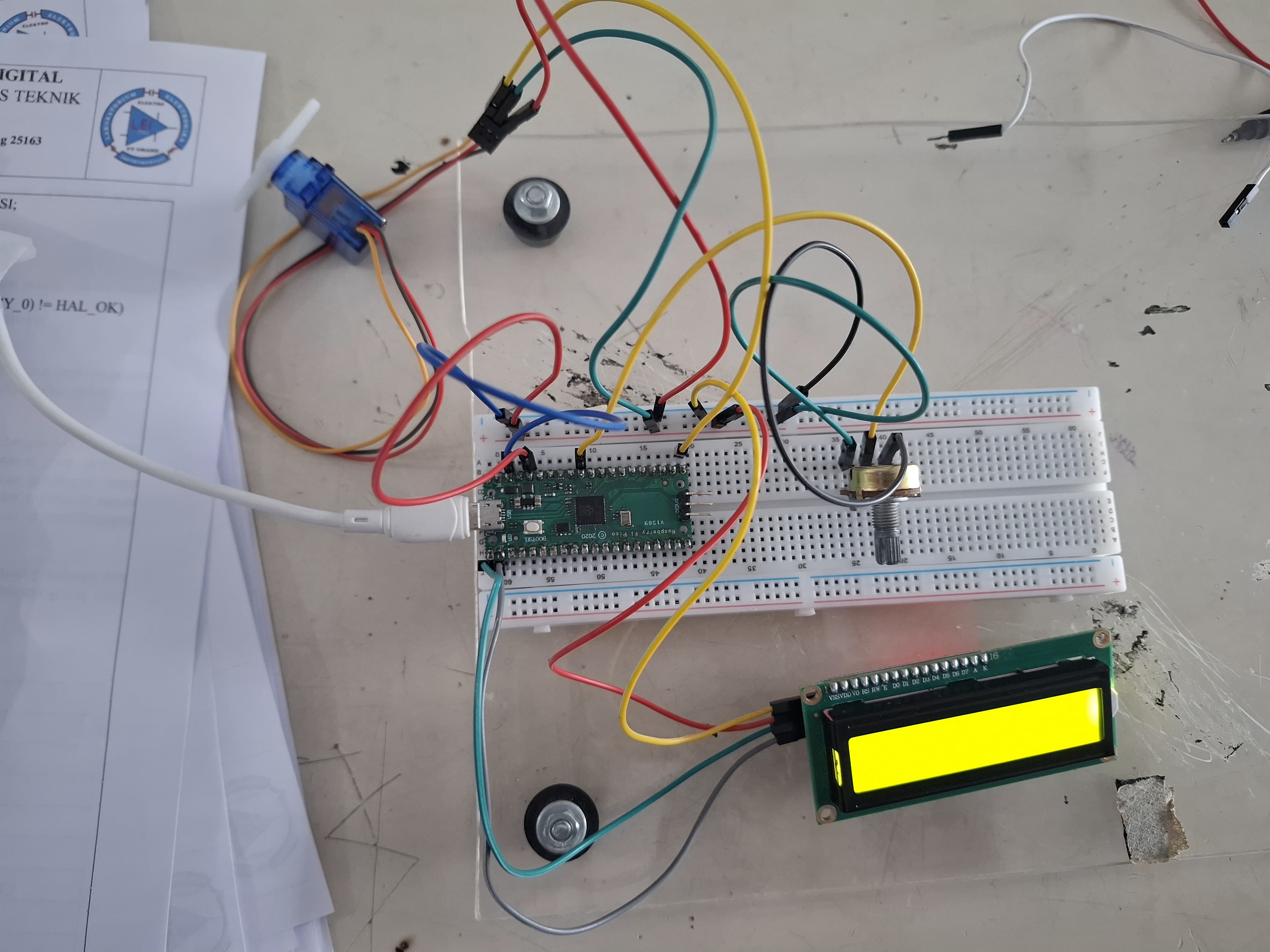
Dalam percobaan ini, proses input melibatkan penerimaan data atau sinyal oleh mikrokontroler dari perangkat eksternal seperti sensor, modul komunikasi, atau mikrokontroler lain. Misalnya, data suhu dari sensor melalui I²C atau data dari modul GPS melalui UART. Proses output melibatkan pengiriman data atau sinyal oleh mikrokontroler ke perangkat eksternal seperti menyalakan LED, mengirim data ke LCD, atau mengontrol motor. Misalnya, mengirimkan data ke layar OLED melalui I²C atau mengirimkan perintah ke modul Bluetooth melalui UART.
4. Algoritma Percobaan
Algoritma umum yang digunakan dalam percobaan komunikasi mikrokontroler ini meliputi beberapa tahap. Pertama, inisialisasi yang mencakup pengaturan konfigurasi pin dan inisialisasi protokol komunikasi yang digunakan (UART, SPI, atau I²C). Kedua, loop utama yang terdiri dari penerimaan data, pemrosesan data, dan pengiriman data. Pada tahap penerimaan data, sistem mengecek apakah ada data yang masuk melalui protokol komunikasi yang digunakan. Jika ada, data dibaca dan disimpan untuk diproses. Pada tahap pemrosesan data, data yang diterima diproses sesuai dengan kebutuhan aplikasi, seperti mengubah format data atau melakukan perhitungan tertentu. Pada tahap pengiriman data, data hasil pemrosesan dikirimkan ke perangkat lain melalui protokol komunikasi yang sesuai. Terakhir, penanganan kesalahan yang melibatkan implementasi mekanisme untuk mendeteksi dan menangani kesalahan komunikasi, seperti parity check pada UART atau acknowledgment pada I²C.





Komentar
Posting Komentar